1台の車を正確に走らせるような自動運転の研究は世界中で行われていますが、この研究のテーマは、世の中に自動運転の車がたくさん普及したときに、その車はどういうコミュニケーションをとりながら、安心、安全、効率性を実現するのかということです。
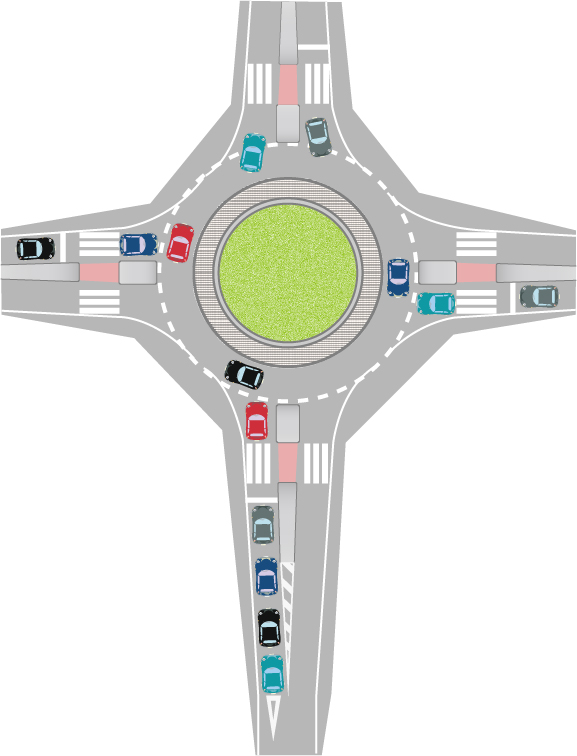
この研究ではラウンドアバウトという信号機のない交差点を実験コースとしていて、信号機がないため内側と外側のどちらかが常に優先となります。
内側が優先の場合は、内側の車が途切れた時にしか外側の車が入れないというのがルールになりますが、優先だからと内側の車が絶対に譲らないと、外側が酷い渋滞になってしまいます。
しかし、内側の車がちょっと譲ってあげて1台でも外側の車を入れてあげると、一気に交通が通るということが起こりえます。
このような状況になった時に、果たしてAIは「ルールだから譲らない」となるのか。
または、人間のように渋滞の合流地点などで、ルールではこちらが優先だといっても、いつの間にか交互に入れていくように、自然発生的な譲り合いがAIの中でも生まれてくるのか。
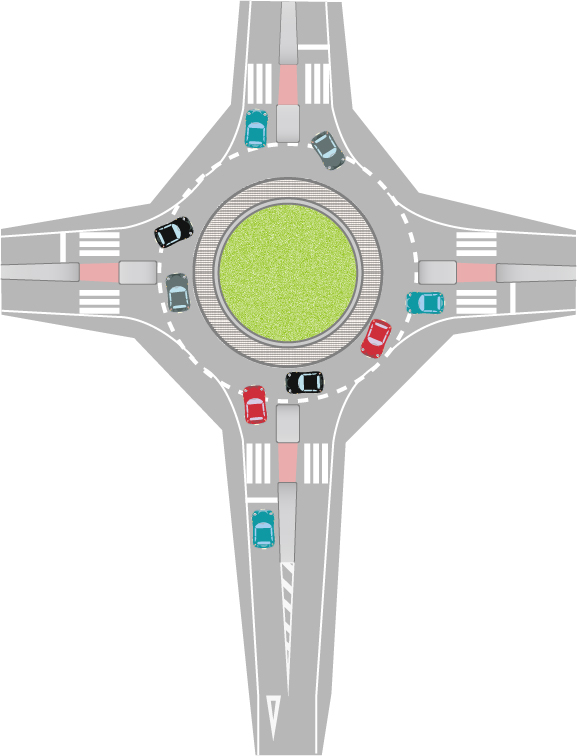
走っているときに譲るのか譲らないのか、次にどうするのかという行動をAIの選択肢に委ね、ラジコンカー全てにディープラーニングを搭載して、社会全体の安全と効率を目的関数として与えてディープラーニングで学習させると、AIは自分が優先でもちょっと譲ってあげようということができるようになります。
自分がとにかく早く行ければいいとなると、譲る一時は必ず自分は損なので、絶対に譲らないとなるのですが、逆に交通渋滞に巻き込まれる側になったときに誰かが譲ってくれると早く目的地に行けることになるので、社会全体としては譲り合いをしていると効率がよくなることをディープラーニングで発見できたという事例になります。
自動運転の車が社会に普及したときには、当然5 Gで全部が繋がって、車どうし色々なことを通信しながら運転するのだと思います。
その時は人間がプロトコルを与えたとしても、必ずしも想定された状況ばかりではないので、色々な不測の事態も含めてAI同士がきちんと学習の中から折り合いをつけなければならなくなります。 そのためにはどんな基礎技術が必要なのかなと、少し先の未来を考えてこのような共同研究を行っています。
受賞
| 年度 | 氏名 | 賞 | タイトル |
| 2020 | 織田 智矢, 横山 想一郎, 山下 倫央, 川村 秀憲, 蕨野 貴之, 大岸 智彦, 田中 英明(株式会社KDDI総合研究所) | 第20回複雑系マイクロシンポジウム 優秀プレゼンテーション賞 | RC カーを用いた自動運転車両シミュレーション環境の構築 |
| 2019 | 織田 智矢, 横山 想一郎, 山下 倫央, 川村 秀憲, 蕨野 貴之, 大岸 智彦, 田中 英明 | 情報処理北海道シンポジウム2019 優秀ポスター賞 | 自動運転車両の群制御に向けた RC カー を用いたシミュレーション環境の構築 |
| 2018 | 小川 一太郎, 横山 想一郎, 山下 倫央, 川村 秀憲, 酒 徳哲, 柳原 正, 大岸 智彦, 田中 英明 | 一般社団法人人工知能学会の全国大会学生奨励賞 | Deep Q-Networkを用いた自動運転車のゆずりあいによる交通流の効率化 |
| 2017 | 小川 一太郎 | 一般社団法人札幌青年会議所サッポロスマイルアワード2017 YOUTH部門賞 | RCカーの自動運転を実現するAIの研究に対して |